
bit-tech's Introduction
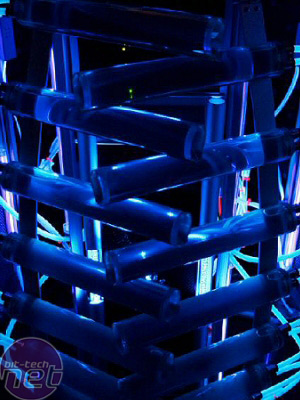
This month's feature mod is the fantastic AquaSphere, by Chewy. He has managed to produce one of the most spectcularly original cases we've ever had the pleasure of seeing. First of all, here's a couple of eye-candy shots of the finished product:


The construction of the case was a fiendishly complicated job, with lots of cutting-edge stuff to contend with. Who could put it better, then, than the man himself? Take it away Chewy...
Project AquaSphere - the Aquabot
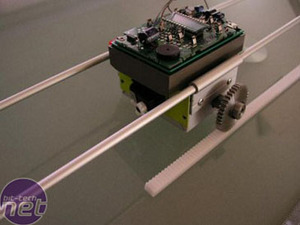
Project Aquasphere started with a simple question, 'is it possible to build a robot to control a robot?'. My answer to this question I named 'Aquabot', a small self-constructed robot whose job it is to control the power to the motors which open and close the case. When I started construction of the 'Aquabot' I wasn't sure it would work, the picture below shows it in action - sliding along two aluminium bars:
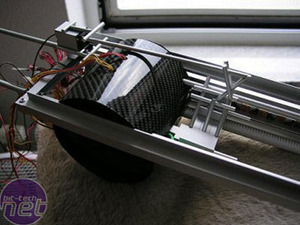
And in a carbon-fibre case:
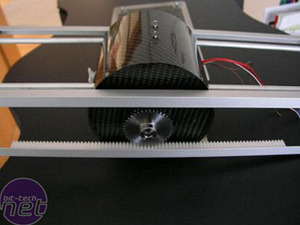
The power transmitter, shown below, looks a bit like a cannon, but it's just a box for the flexible suspension of the carbon current collectors which transport power from the relays to the copper contacts on the side of the robot:
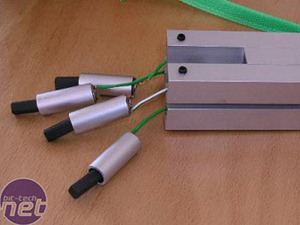

The carbon collectors slide from one pair of contacts to the next as the motor moves along:

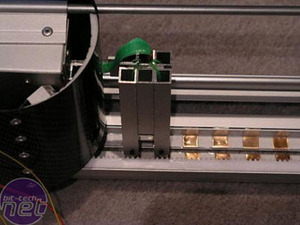
The upper set of contacts are for moving the motor forwards and the lower backwards, in the right hand picture above you can just see one of the relays in the carbon fibre case.
The robot almost complete:
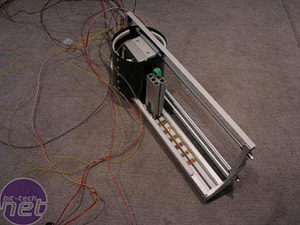
Sometimes form follows function; the bar construction you can see below is a part of the sensor contact, so the motor stops when it gets to the end of the line. Having this end of the line sensor gives the motor a fixed point of reference, useful for calibrating the movements of the motor:


The sensor is mounted on the end of the bar.


You can see the sensor and motor cabling in detail - everything was tested before construction of the case started, I was very pleased and proud with how well the Aquabot worked.




MSI MPG Velox 100R Chassis Review
October 14 2021 | 15:04

Want to comment? Please log in.